|
 |
|
 |
| EN |
|
Поиск по сайту
Авторизация
Подписка на новости
Информация

|
SPI
SPI (Serial Peripheral Interface / SPI bus – последовательный периферийный интерфейс, шина SPI) – последовательный синхронный стандарт передачи данных в режиме полного дуплекса, предназначенный для обеспечения простого и недорогого высокоскоростного сопряжения микроконтроллеров и периферии. SPI также иногда называют четырёхпроводным интерфейсом. В отличие от стандартного последовательного порта, SPI является синхронным интерфейсом, в котором любая передача синхронизирована с общим тактовым сигналом, генерируемым ведущим устройством (процессором). Принимающая (ведомая) периферия синхронизирует получение битовой последовательности с тактовым сигналом. К одному последовательному периферийному интерфейсу ведущего устройства-микросхемы может присоединяться несколько микросхем. Ведущее устройство выбирает ведомое для передачи, активируя сигнал «выбор кристалла» на ведомой микросхеме. Периферия, не выбранная процессором, не принимает участия в передаче по SPI. В SPI используются четыре цифровых сигнала:
Синхронизация в SPI Частота следования битовых интервалов в линиях передачи данных определяется синхросигналом SCK, который генерирует ведущее устройство, ведомые устройства используют синхросигнал для определения моментов изменения битов на линии данных, при этом ведомые устройства никак не могут влиять на частоту следования битовых интервалов. Как в ведущем устройстве, так и в ведомом устройстве имеется счетчик импульсов синхронизации (битов). Счетчик в ведомом устройстве позволяет последнему определить момент окончания передачи пакета. Счетчик сбрасывается при выключении подсистемы SPI, такая возможность всегда имеется в ведущем устройстве. В ведомом устройстве счетчик обычно сбрасывается деактивацией интерфейсного сигнала SS. Так как действия ведущего и ведомого устройства тактируются одним и тем же сигналом, то к стабильности этого сигнала не предъявляется никаких требований, за исключением ограничения на длительность полупериодов, которая определяется максимальной рабочей частотой более медленного устройства. Это позволяет использовать SPI в системах с низкостабильной тактовой частотой, а также облегчает программную эмуляцию ведущего устройства. Приём и передача данных в SPI Передача осуществляется пакетами. Длина пакета, как правило, составляет 1 байт (8 бит), при этом известны реализации SPI с иной длиной пакета, например, 4 бита. Ведущее устройство инициирует цикл связи установкой низкого уровня на выводе выбора подчиненного устройства (SS) того устройства, с которым необходимо установить соединение. При низком уровне сигнала SS:
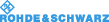
Подлежащие передаче данные ведущее и ведомое устройства помещают в сдвиговые регистры. После этого ведущее устройство начинает генерировать импульсы синхронизации на линии SCLK, что приводит к взаимному обмену данными. Передача данных осуществляется бит за битом от ведущего по линии MOSI и от ведомого по линии MISO. Передача осуществляется, как правило, начиная со старших битов, но некоторые производители допускают изменение порядка передачи битов программными методами. После передачи каждого пакета данных ведущее устройство, в целях синхронизации ведомого устройства, может перевести линию SS в высокое состояние.
На рис.: Типичная структура связей и линий интерфейса SPI Режимы работы интерфейса SPI Возможны четыре комбинации фазы (CPHA) и полярности (CPOL) сигнала SCLK по отношению к сигналам данных. Режимы работы определяются комбинацией бит CPHA и CPOL:
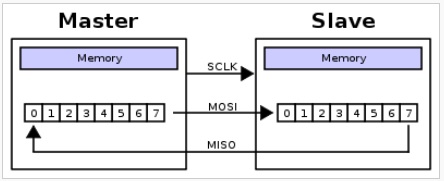
Для обозначения режимов работы интерфейса SPI принято следующее соглашение:
На рис.: Временные диаграммы работы интерфейса SPI при CPHA = 0 (красная вертикальная линия) и CPHA = 1 (синяя вертикальная линия) |
Читайте бесплатно
События из истории измерений
|